
This is an overview of my key publications. My full publication list can be found on my Google Scholar profile.
Series and parallel elastic actuation: Impact of natural dynamics on power and energy consumption
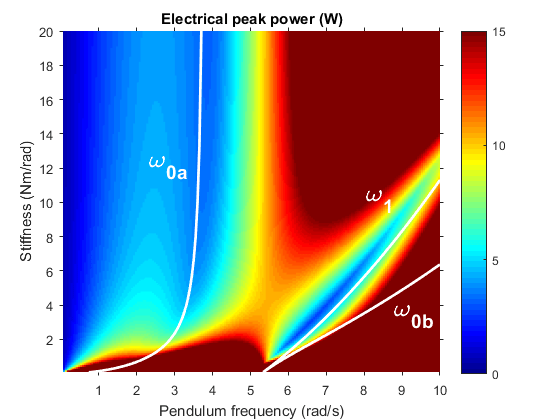
Citation: Verstraten T., Beckerle P., Furnémont R., Mathijssen G., Vanderborght B., & Lefeber D. (2016). Series and parallel elastic actuation: Impact of natural dynamics on power and energy consumption. Mechanism and Machine Theory, 102, 232-246.
This paper provides a detailed analysis of the power and mechanical/electrical energy consumption of Series Elastic Actuators (SEAs) and Parallel Elastic Actuators (PEAs). Simulations demonstrate that the SEA and PEA allow to decrease both peak power and energy consumption, provided that the stiffness of their elastic element is tuned properly. For the SEA, both are minimized by tuning the elastic element to the antiresonance frequency of the actuator. For the PEA, peak power is minimal at the link’s resonance frequency, but the optimal stiffness for minimal electrical energy consumption cannot be determined by a theoretical resonance and needs to be calculated using a complete system model. Experiments confirm that, if these guidelines are followed, both types of elastic actuators can provide significant energetic benefits at high frequencies.
Compact gearboxes for modern robotics: A review
Citation: López García P., Crispel S., Saerens E., Verstraten T., Lefeber D. (2020). Compact gearboxes for modern robotics: A review. Frontiers in Robotics and AI, 7, 103.
The performance of Human-Robot-Interaction (HRI) robotic devices remains strongly conditioned by their gearboxes. In most industrial robots, two relatively unconventional transmission technologies—Harmonic Drives© and Cycloid Drives—are usually found, which are not so broadly used in other industries. Understanding the origin of this singularity provides valuable insights in the search for suitable, future robotic transmission technologies. In this paper we propose an assessment framework strongly conditioned by HRI applications, and we use it to review the performance of conventional and emerging robotic gearbox technologies, for which the design criterion is strongly shifted toward aspects like weight and efficiency. The framework proposes to use virtual power as a suitable way to assess the inherent limitations of gearbox technologies to achieve high efficiencies. This paper complements the existing research dealing with the complex interaction between gearbox technologies and the actuators, with a new gearbox-centered perspective particularly focused on HRI applications.
Kinematically redundant actuators, a solution for conflicting torque–speed requirements
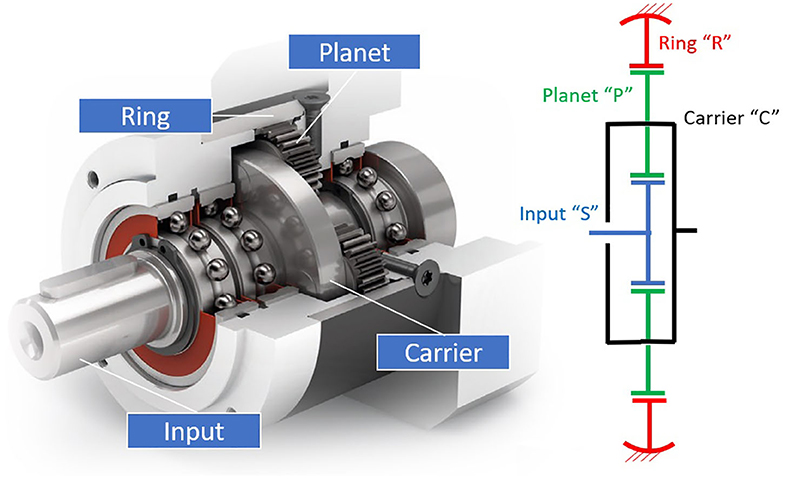
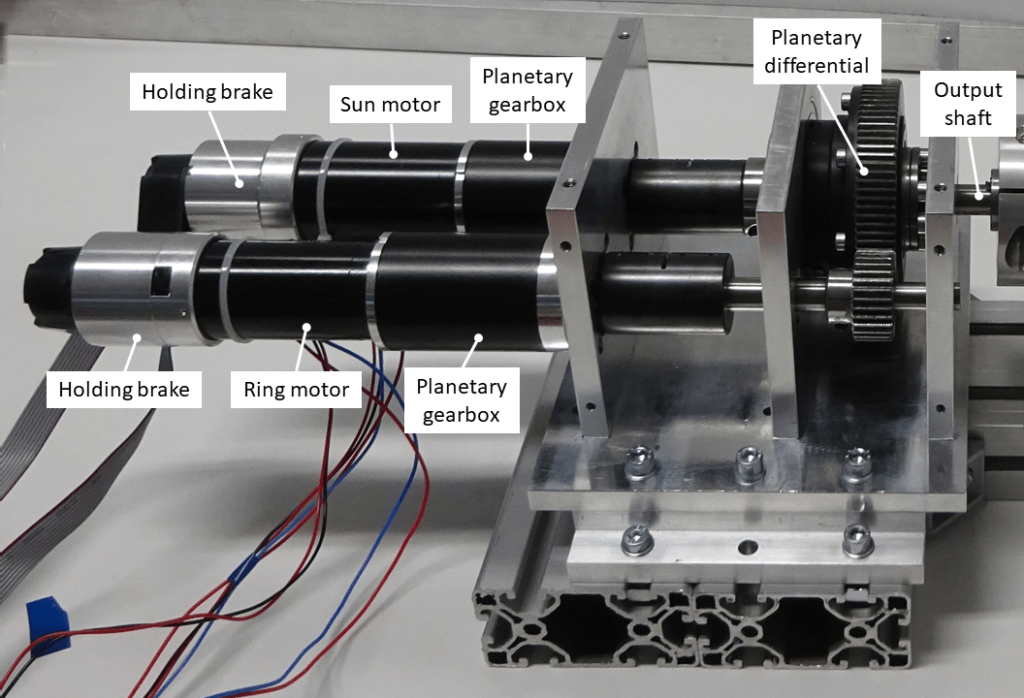
Citation: Verstraten, T., Furnémont, R., Lopez-Garcia, P., Rodriguez-Cianca, D., Vanderborght, B., & Lefeber, D. (2019). Kinematically redundant actuators, a solution for conflicting torque–speed requirements. The International Journal of Robotics Research, 38(5), 612-629.
Robots often switch from highly dynamic motion to delivering high torques at low speeds. The actuation requirements for these two regimes are very different. As a consequence, the average efficiency of the actuators is typically much lower than the efficiency at the optimal working point. A potential solution is to use multiple motors for a single motor joint. This results in a redundant degree of freedom, which can be exploited to make the system more efficient overall. In this work, we explore the potential of kinematically redundant actuators in dynamic applications. A kinematically redundant actuator with two motors is evaluated against a single-motor equivalent in terms of operating range, maximum acceleration, and energy consumption. We discuss how the comparison is influenced by the design of the actuator and the way how the power is distributed over the input motors. Our results support the idea that kinematically redundant actuators can resolve the conflicting torque–speed requirements typical of robots.
Challenges and solutions for application and wider adoption of wearable robots
Citation: Babič, J., Laffranchi, M., Tessari, F., Verstraten, T., Novak, D., Šarabon, N., … & Veneman, J. F. (2021). Challenges and solutions for application and wider adoption of wearable robots. Wearable Technologies, 2, e14.
doi: 10.1017/wtc.2021.13
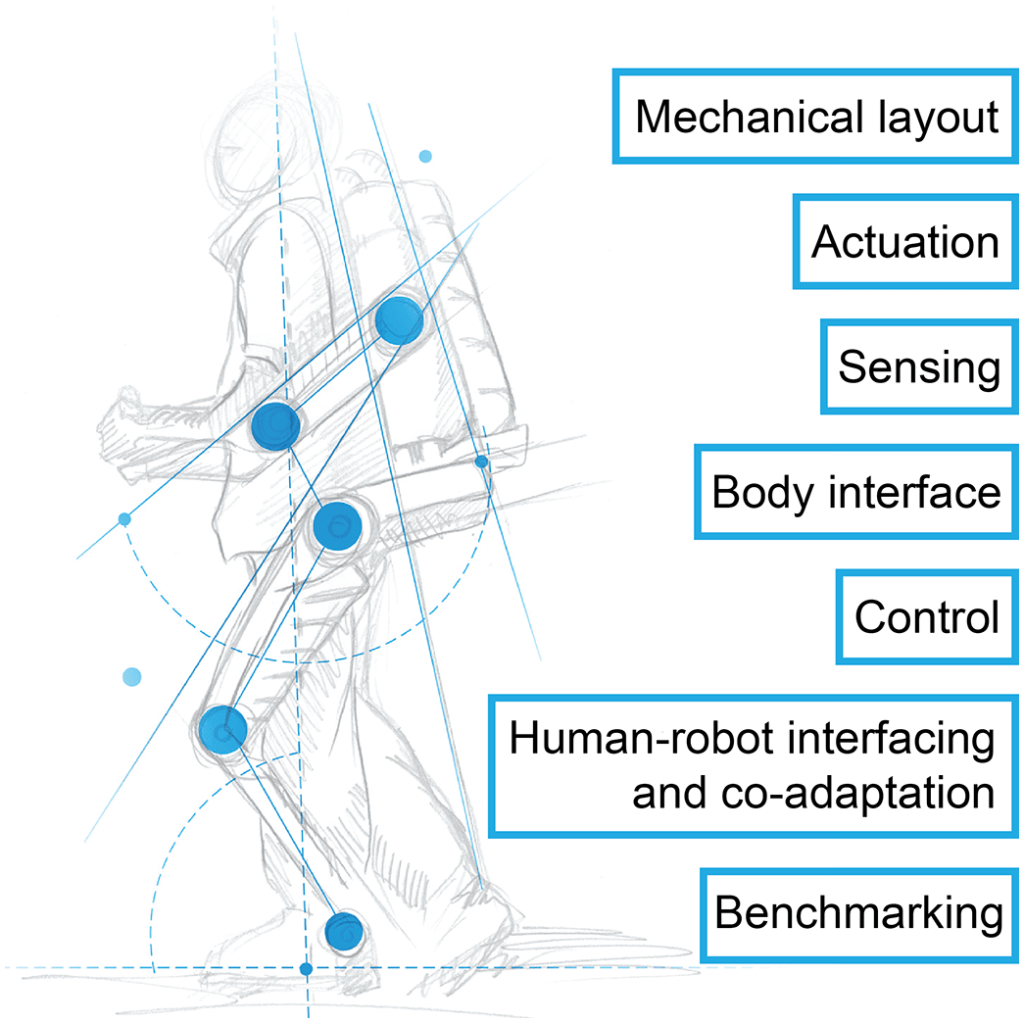
The science and technology of wearable robots are steadily advancing, and the use of such robots in our everyday life appears to be within reach. Nevertheless, widespread adoption of wearable robots should not be taken for granted, especially since many recent attempts to bring them to real-life applications resulted in mixed outcomes. The aim of this article is to address the current challenges that are limiting the application and wider adoption of wearable robots that are typically worn over the human body. We categorized the challenges into mechanical layout, actuation, sensing, body interface, control, human–robot interfacing and coadaptation, and benchmarking. For each category, we discuss specific challenges and the rationale for why solving them is important, followed by an overview of relevant recent works. We conclude with an opinion that summarizes possible solutions that could contribute to the wider adoption of wearable robots.
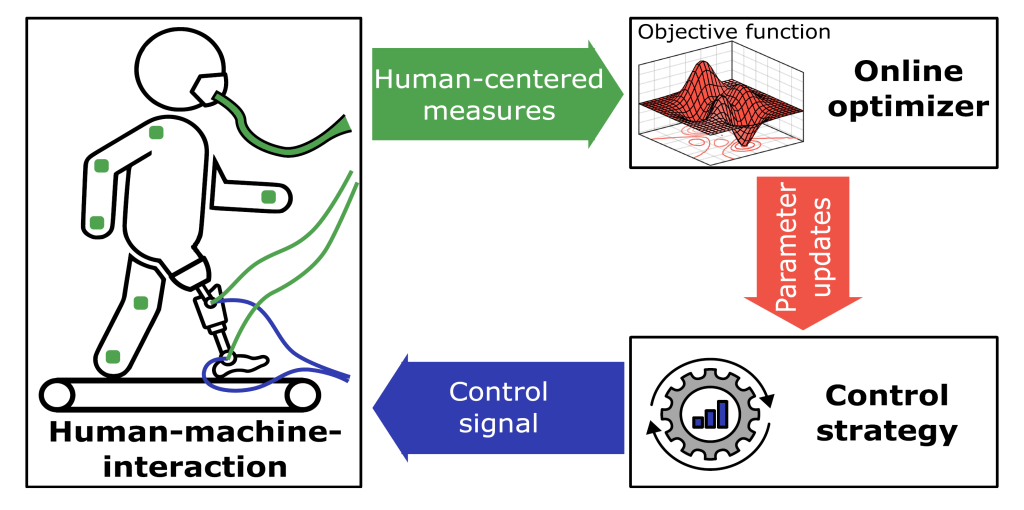
Human-in-the-Loop Optimization of Wearable Robotic Devices to Improve Human–Robot Interaction: A Systematic Review
Citation: Díaz, M. A., Voß, M., Dillen, A., Tassignon, B., Flynn, L., Geeroms, J., … & De Pauw, K. (2022). Human-in-the-Loop Optimization of Wearable Robotic Devices to Improve Human–Robot Interaction: A Systematic Review. IEEE Transactions on Cybernetics.
This article presents a systematic review on wearable robotic devices that use human-in-the-loop optimization (HILO) strategies to improve human–robot interaction. A total of 46 HILO studies were identified and divided into upper and lower limb robotic devices. The main aspects from HILO were identified, reviewed, and classified in four areas: 1) human–machine systems; 2) optimization methods; 3) control strategies; and 4) experimental protocols. A variety of objective functions (physiological, biomechanical, and subjective), optimization strategies, and optimized control parameters configurations used in different control strategies are presented and analyzed. An overview of experimental protocols is provided, including metrics, tasks, and conditions tested. Moreover, the relevance given to training or adaptation periods was explored. We outline an HILO framework that includes current wearable robots, optimization strategies, objective functions, control strategies, and experimental protocols. We conclude by highlighting current research gaps and defining future directions to improve the development of advanced HILO strategies in upper and lower limb wearable robots.
